MPCNC
 Mostly Printed CNC - Mazzo.me
Mostly Printed CNC - Mazzo.me
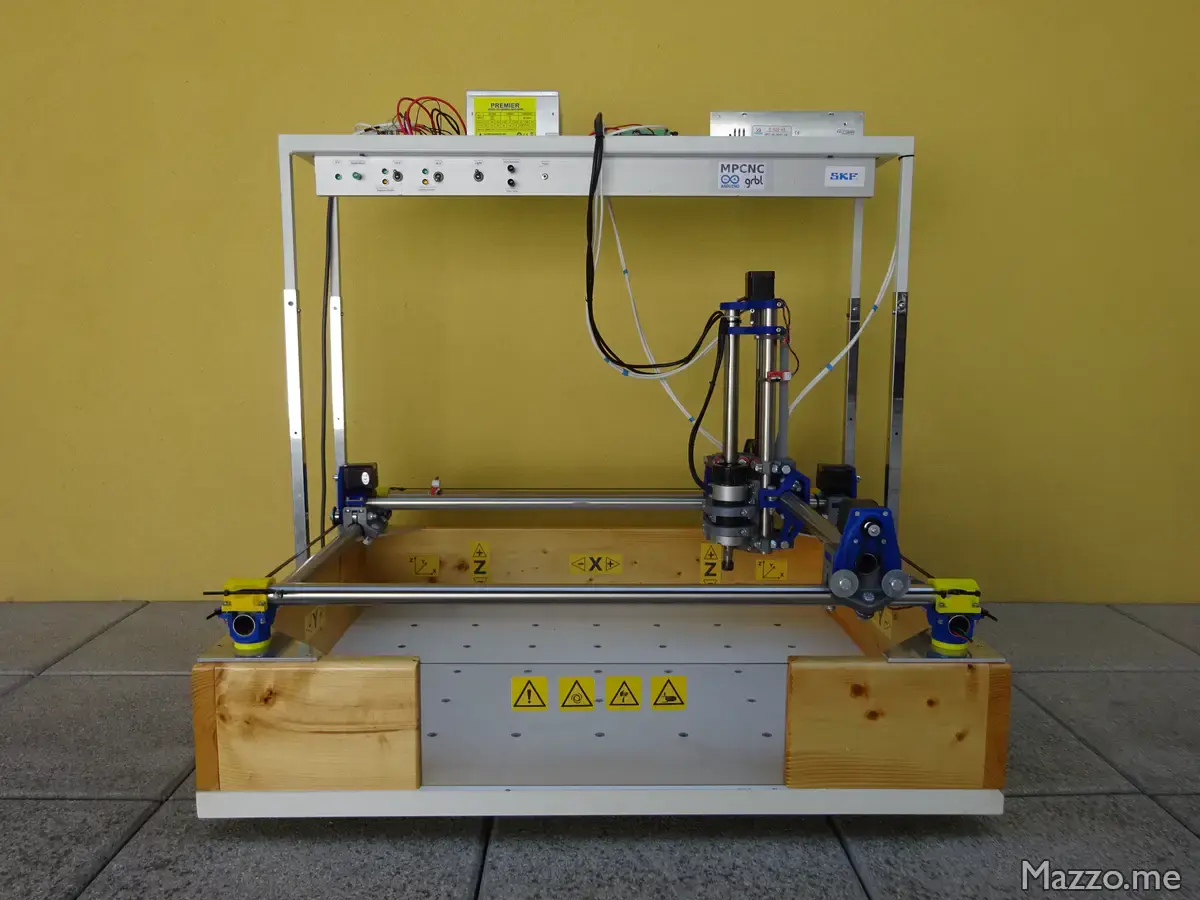
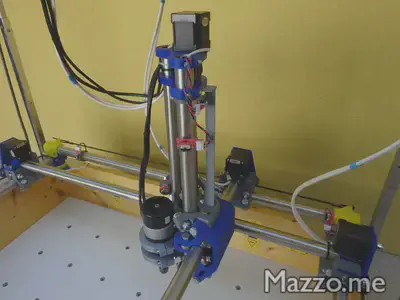
Ho costruito questa macchina a controllo numerico a tre assi grazie al progetto di V1 Engineering. Rispetto al progetto originale ho fatto delle modifiche come un telaio in legno, un piano di lavoro in truciolato e un pannello di controllo per gestire l’elettronica.
Le parti stampate in 3D che compongono la struttura sono state realizzate con la mia Stampante 3D.
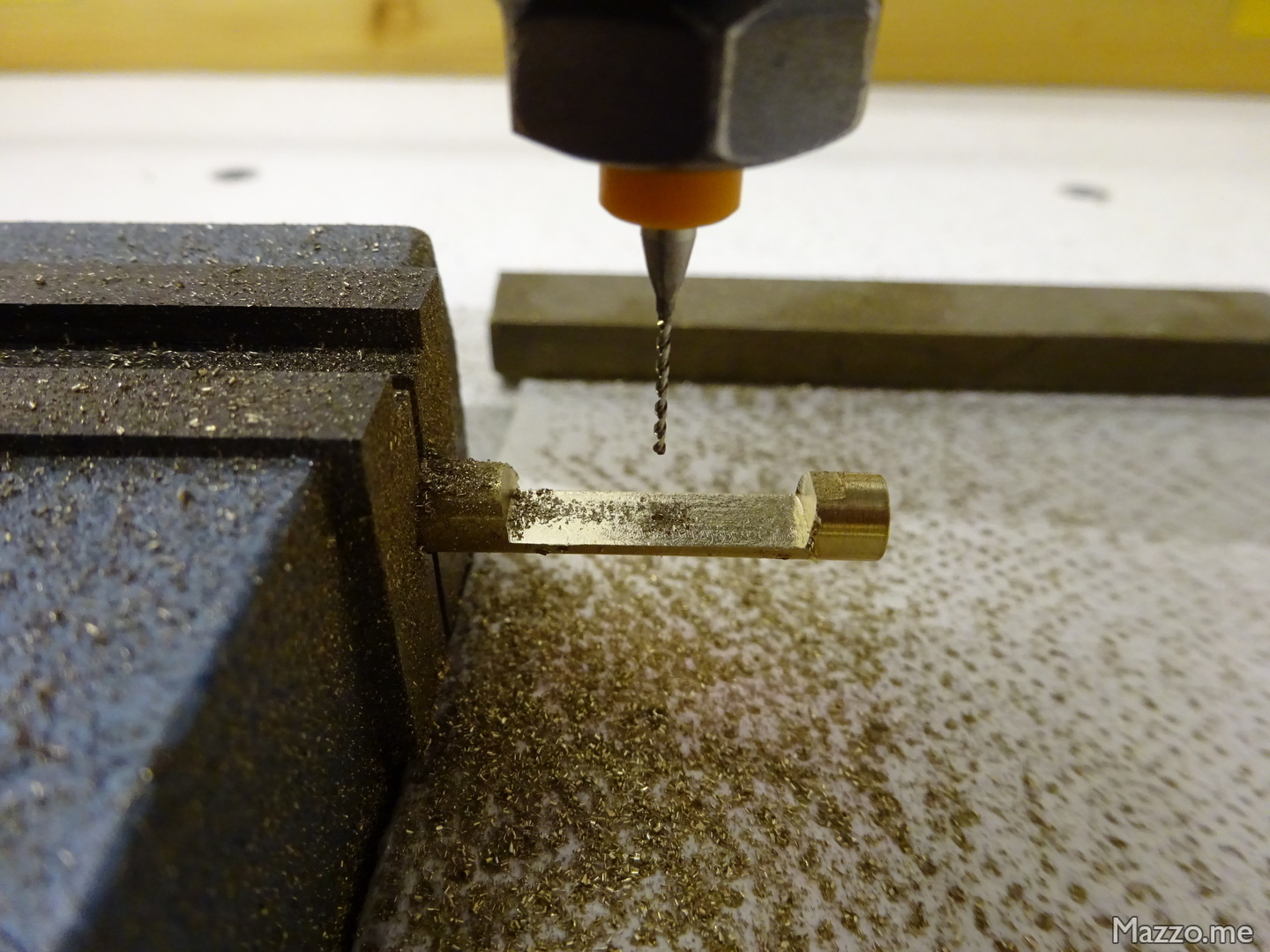
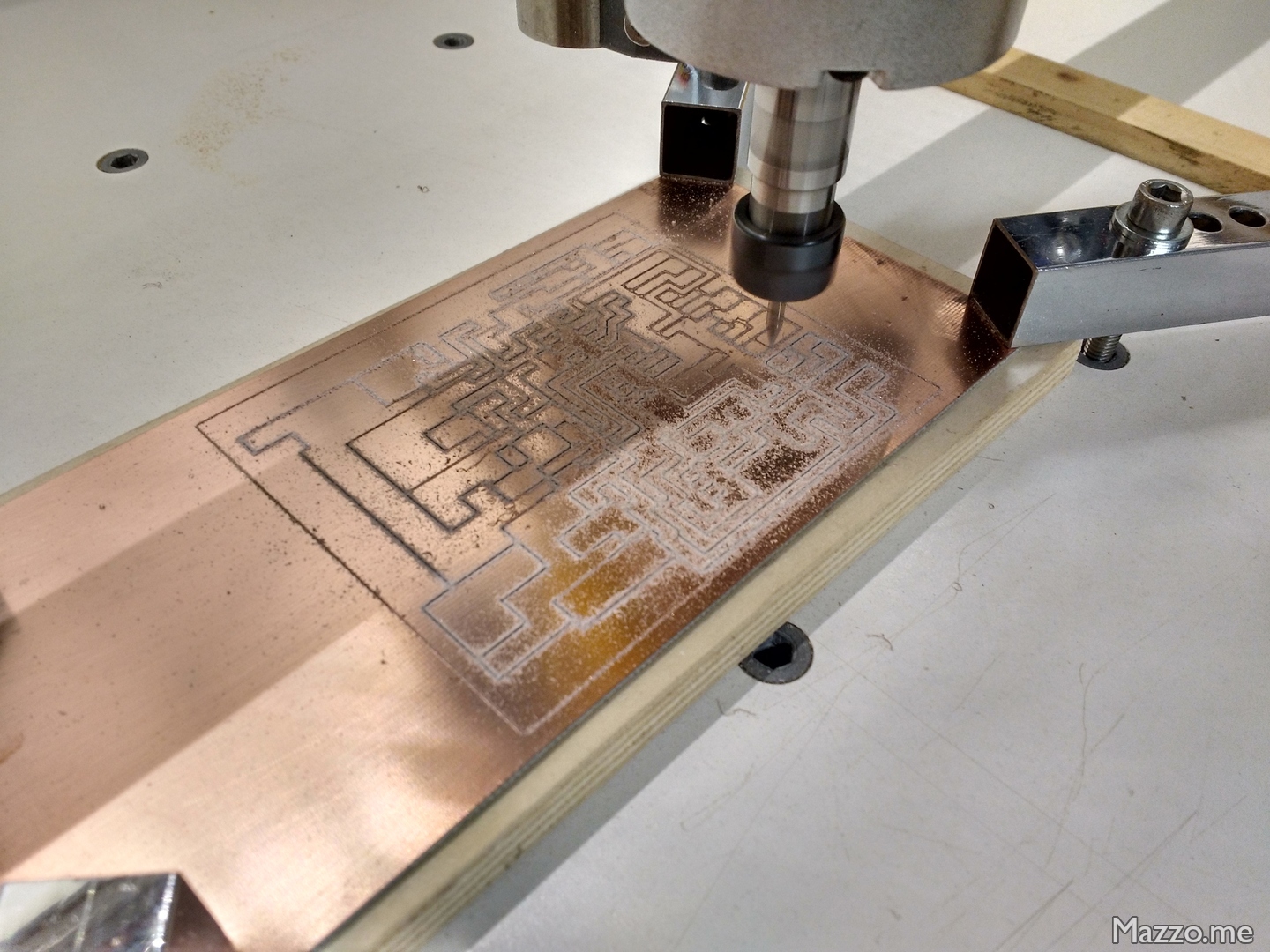
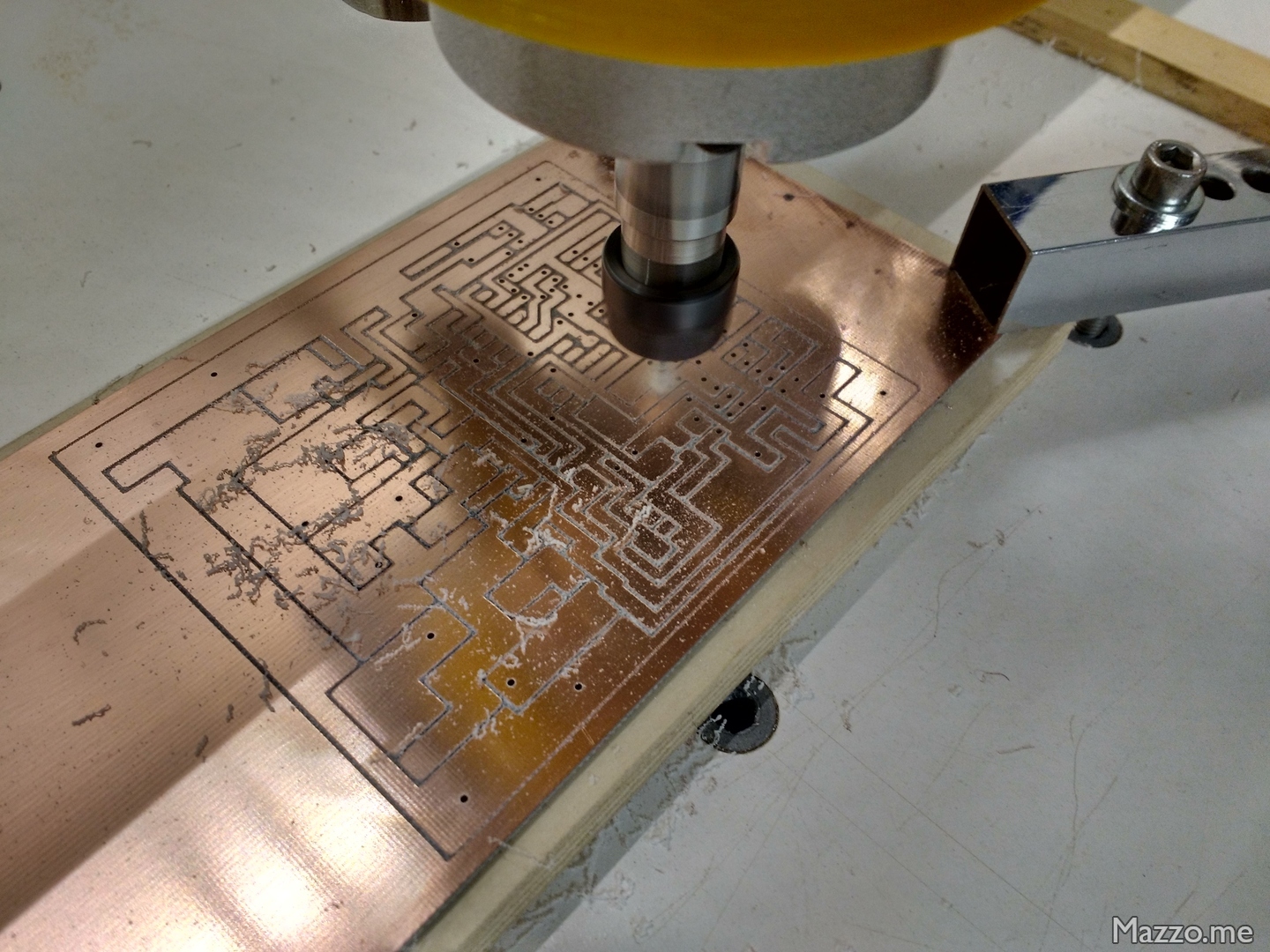
È attrezzata come fresatrice leggera, con un elettromandrino brushless da 400 W che mi permette di lavorare materiali morbidi come legno e polistirolo, ma anche di effettuare alcune lavorazioni su materiali più duri come alluminio e ottone.
Gli assi sono realizzati con tubi in acciaio inox e sono mossi da motori passo passo con movimento a cinghia, mentre l’elettronica è basata su un Arduino con firmware GRBL.
La parte anteriore del telaio può essere aperta rimuovendo una parete in plexiglas:

Le cinghie sono ancorate e tensionate con delle fascette:

La struttura è fissata al telaio con delle piastre di alluminio:


Il movimento degli assi è a cinghia:

I cavi dei motori passano internamente ai tubi:


Così come i cavi dei finecorsa:


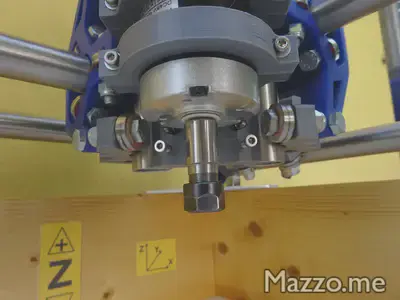
La parte centrale che unisce i tre assi è stampata in 3D:

L’elettromandrino brushless è fissato con dei supporti stampati in 3D:
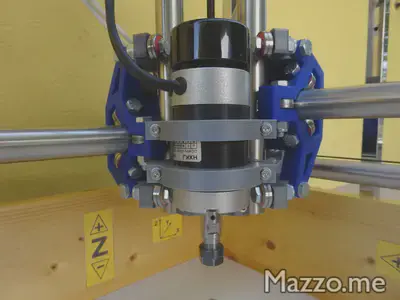
E monta un attacco ER11 che mi permette di prendere utensili con gambo fino a 7 mm:
L’asse Z ha una corsa utile di circa 100 mm:

Su tutti gli assi sono montati finecorsa meccanici sia superiori che inferiori:
Per il finecorsa superiore dell’asse Z ho realizzato una battuta apposita in vetronite:

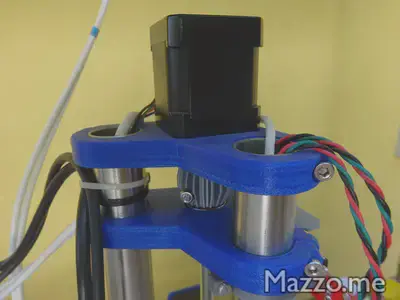
Il giunto del motore dell’asse Z è stampato in 3D per facilitare il movimento manuale:
I finecorsa sono fissati ai tubi di scorrimento:


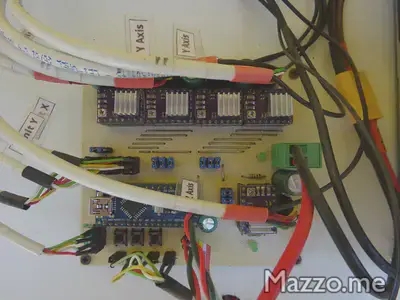
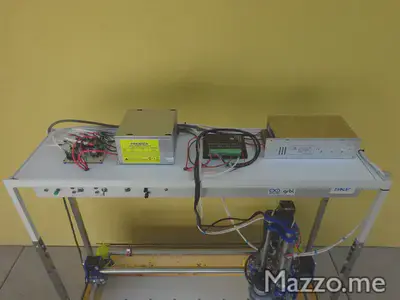
Il pannello di controllo è dotato di pulsanti, interruttori, led indicatori e connettore per sonda:

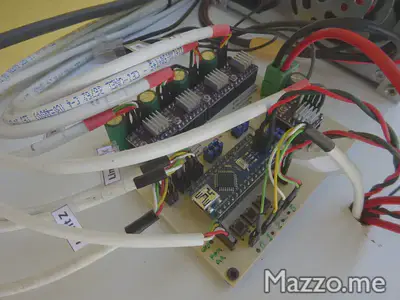
L’elettronica è gestita da un Arduino e monta un driver DRV8825 per ciascun motore:
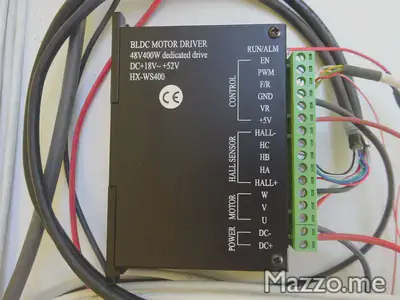
L’elettronica dell’elettromandrino brushless è stata acquistata insieme all’elettromandrino stesso:
Così come l’alimentatore da 48 V:

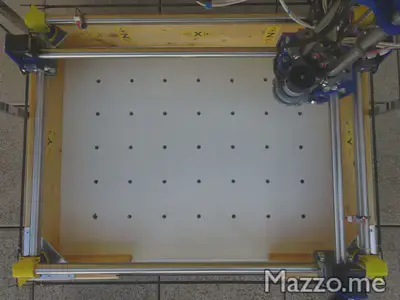
Nel piano di lavoro ho inserito degli inserti filettati:
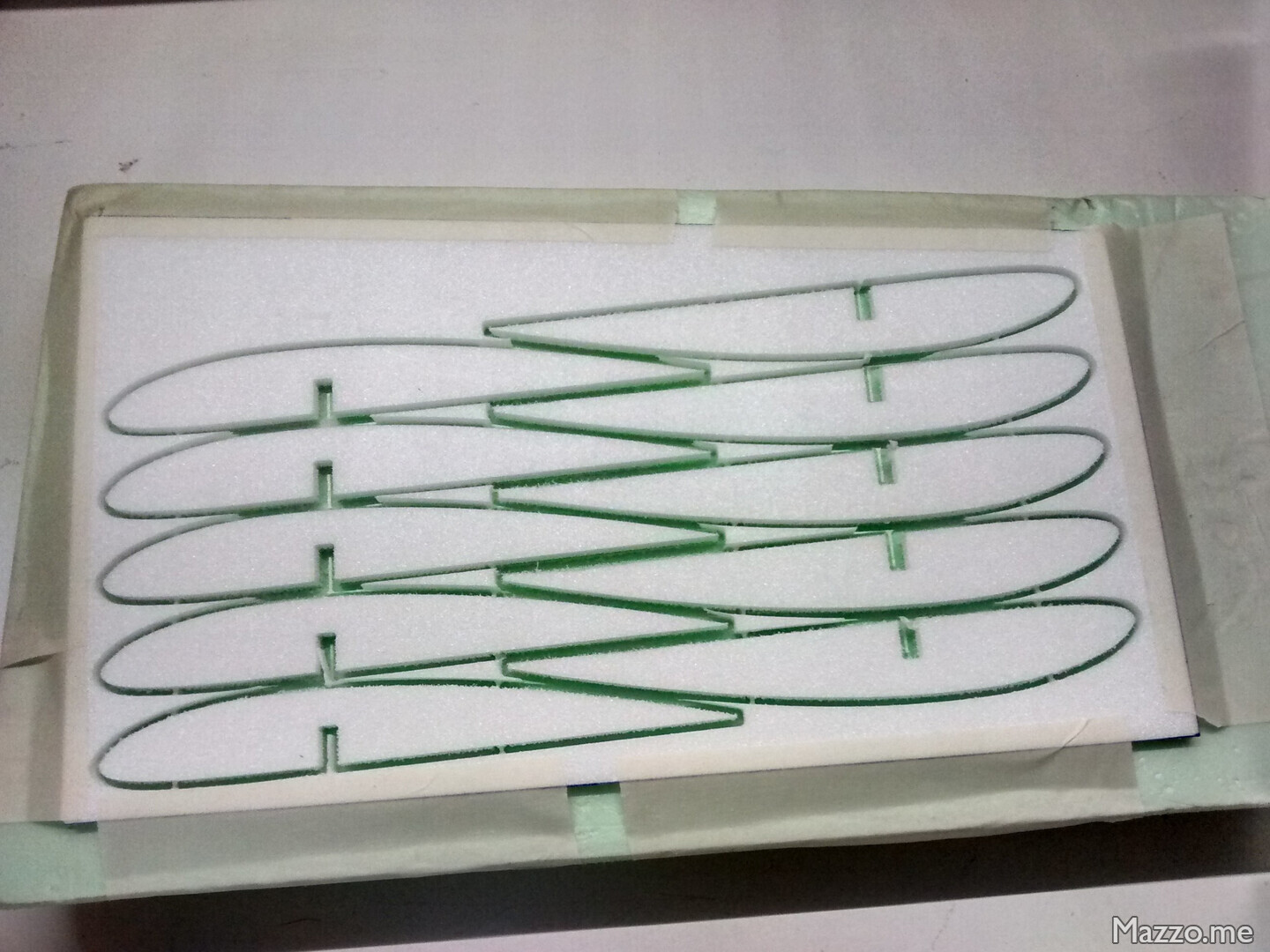
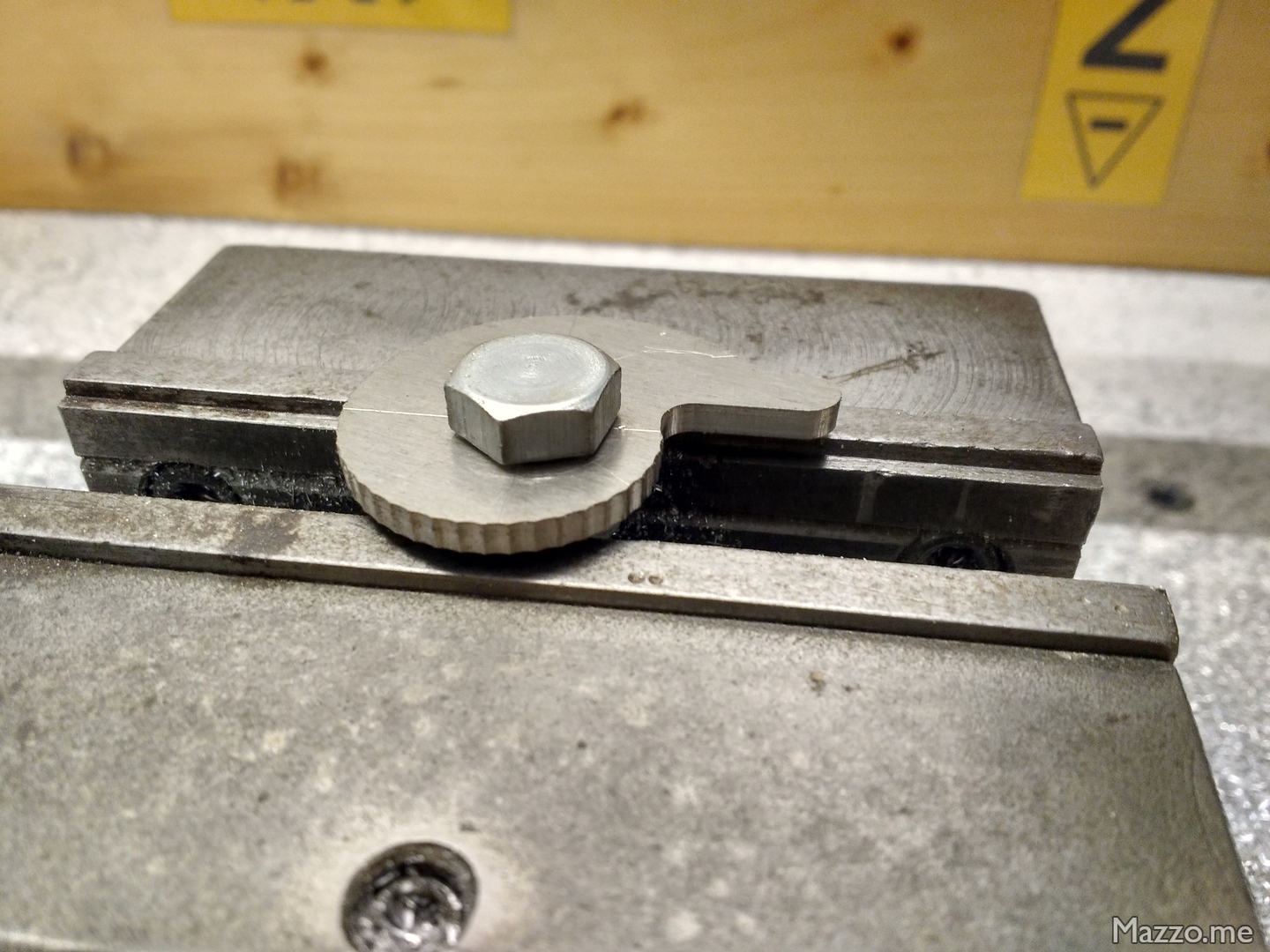
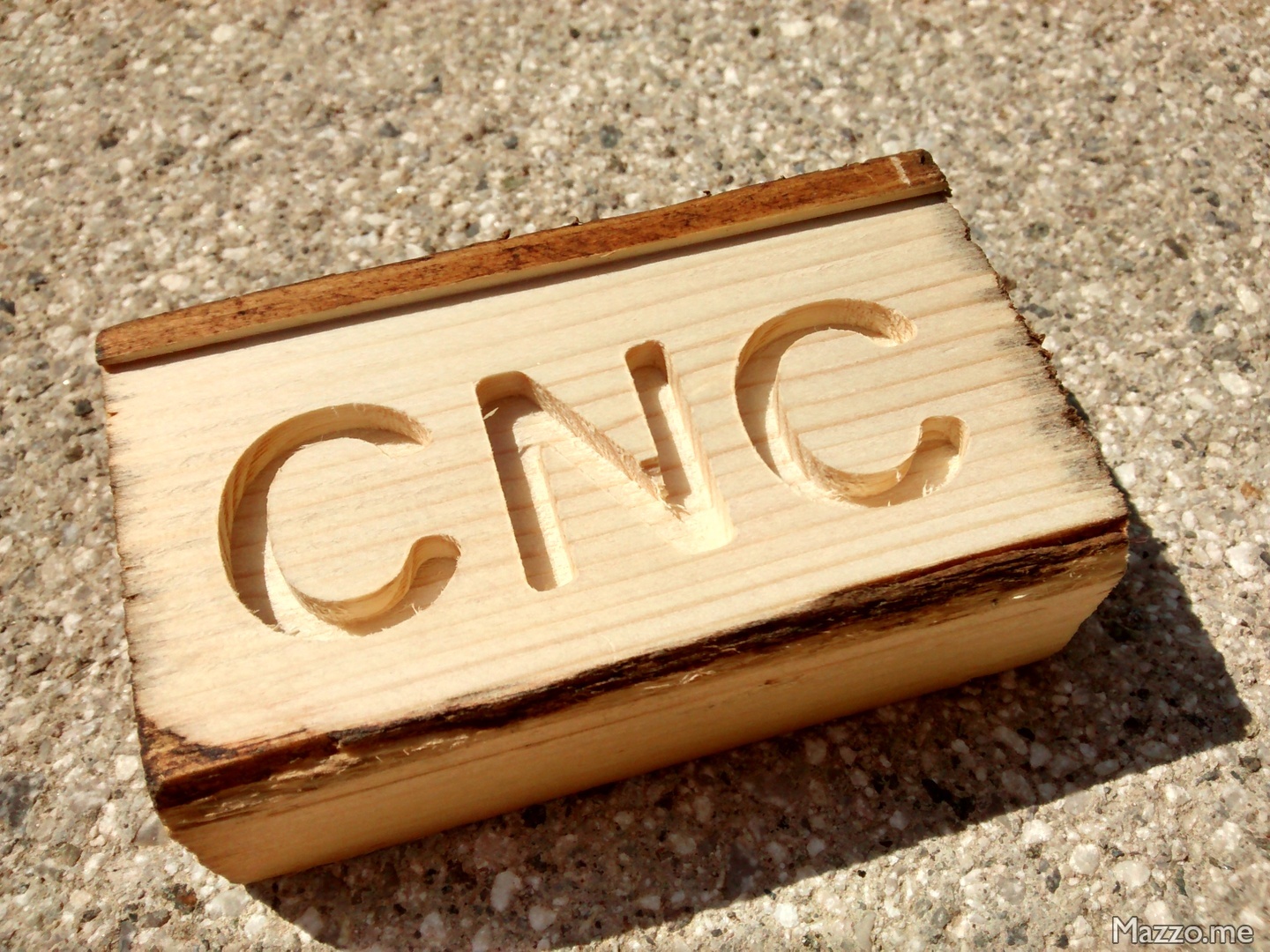
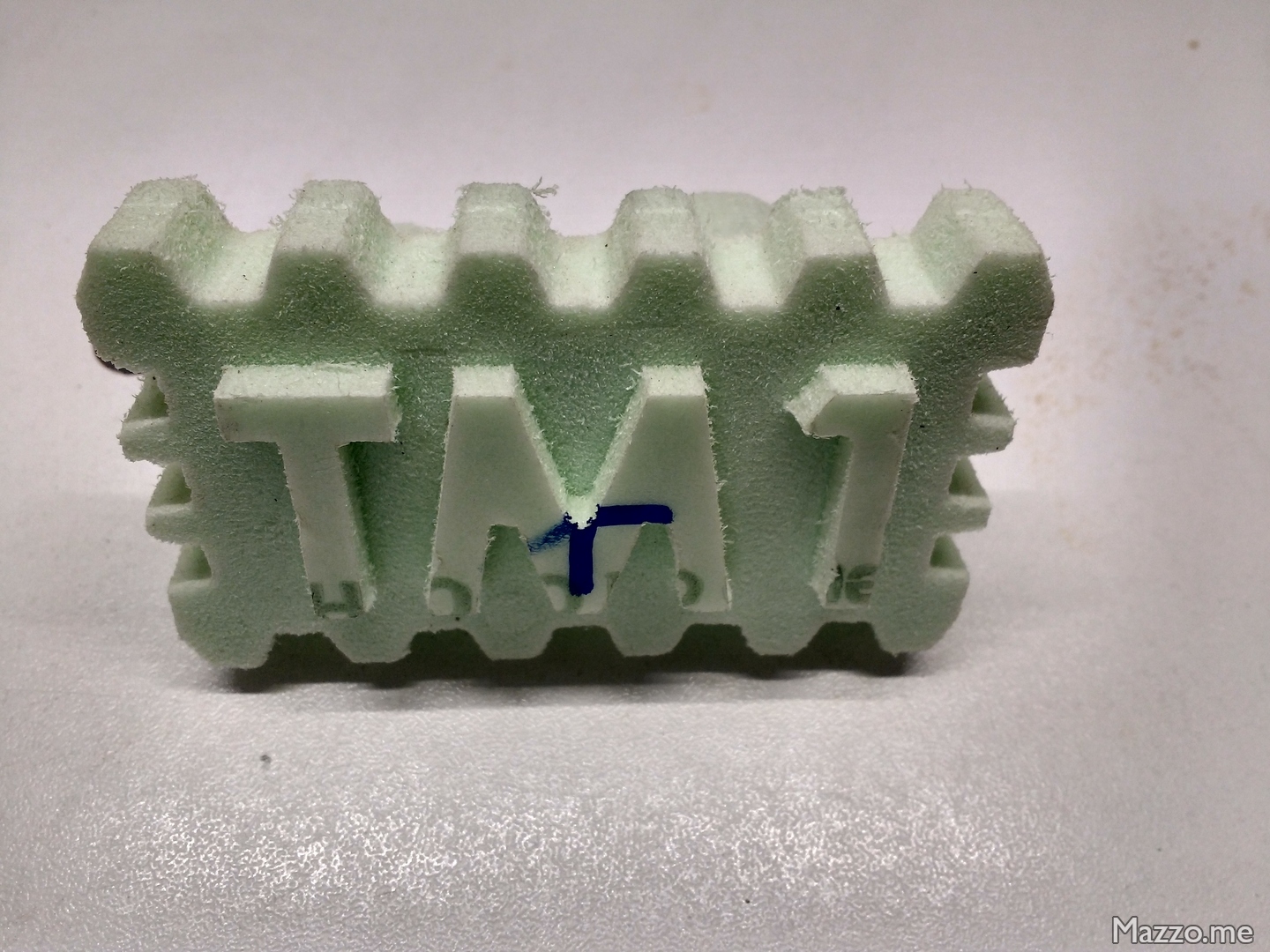
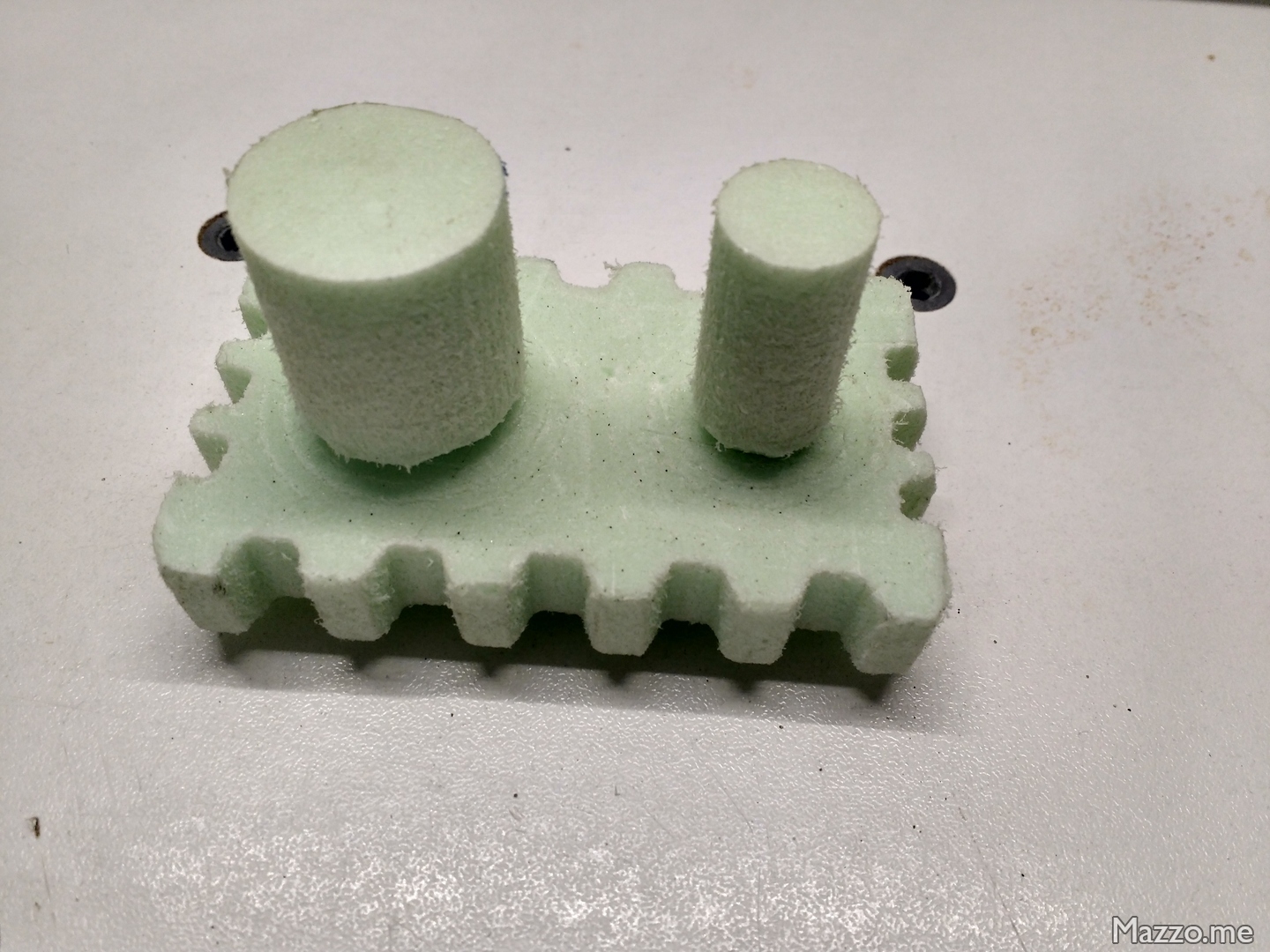
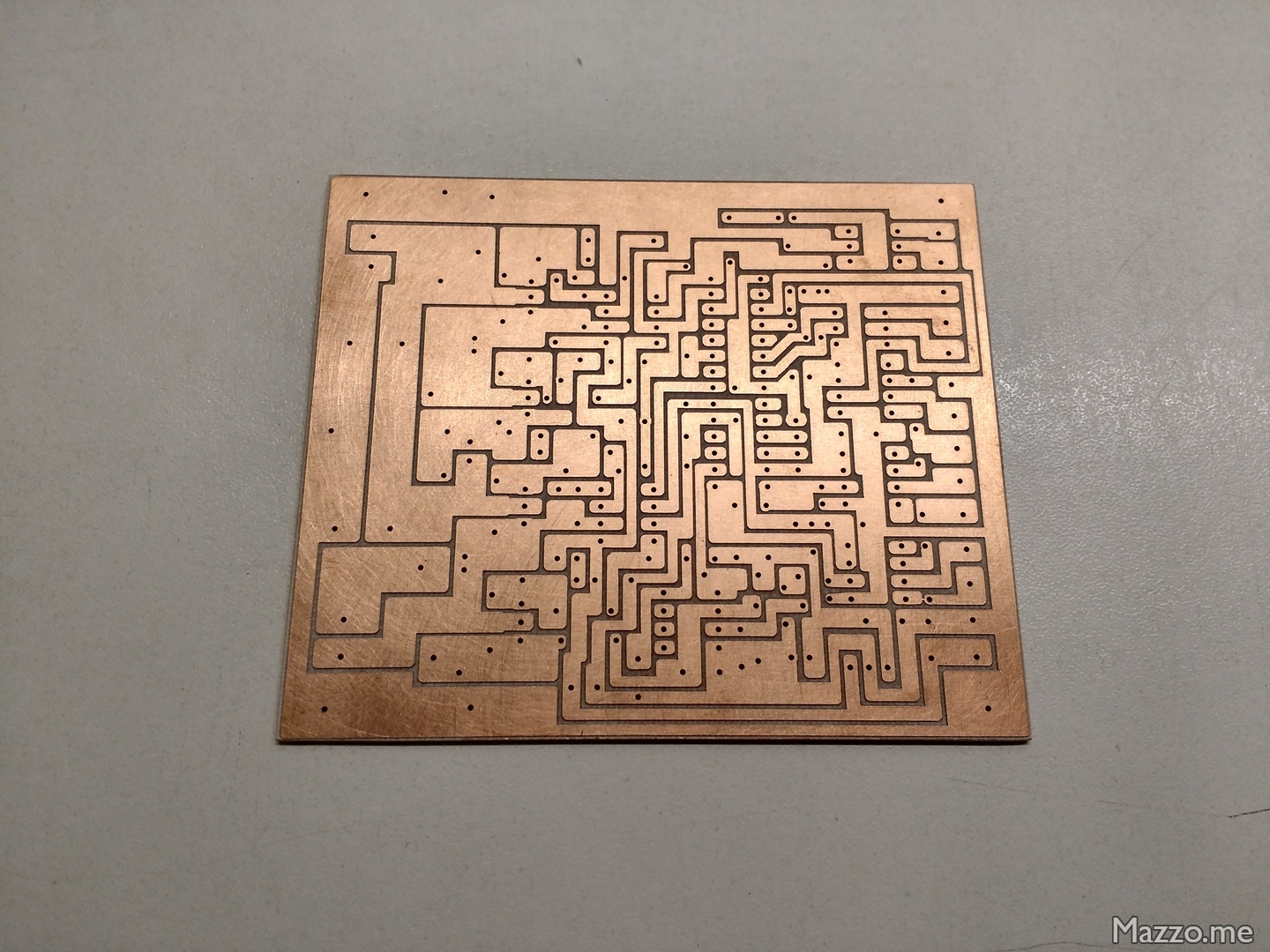
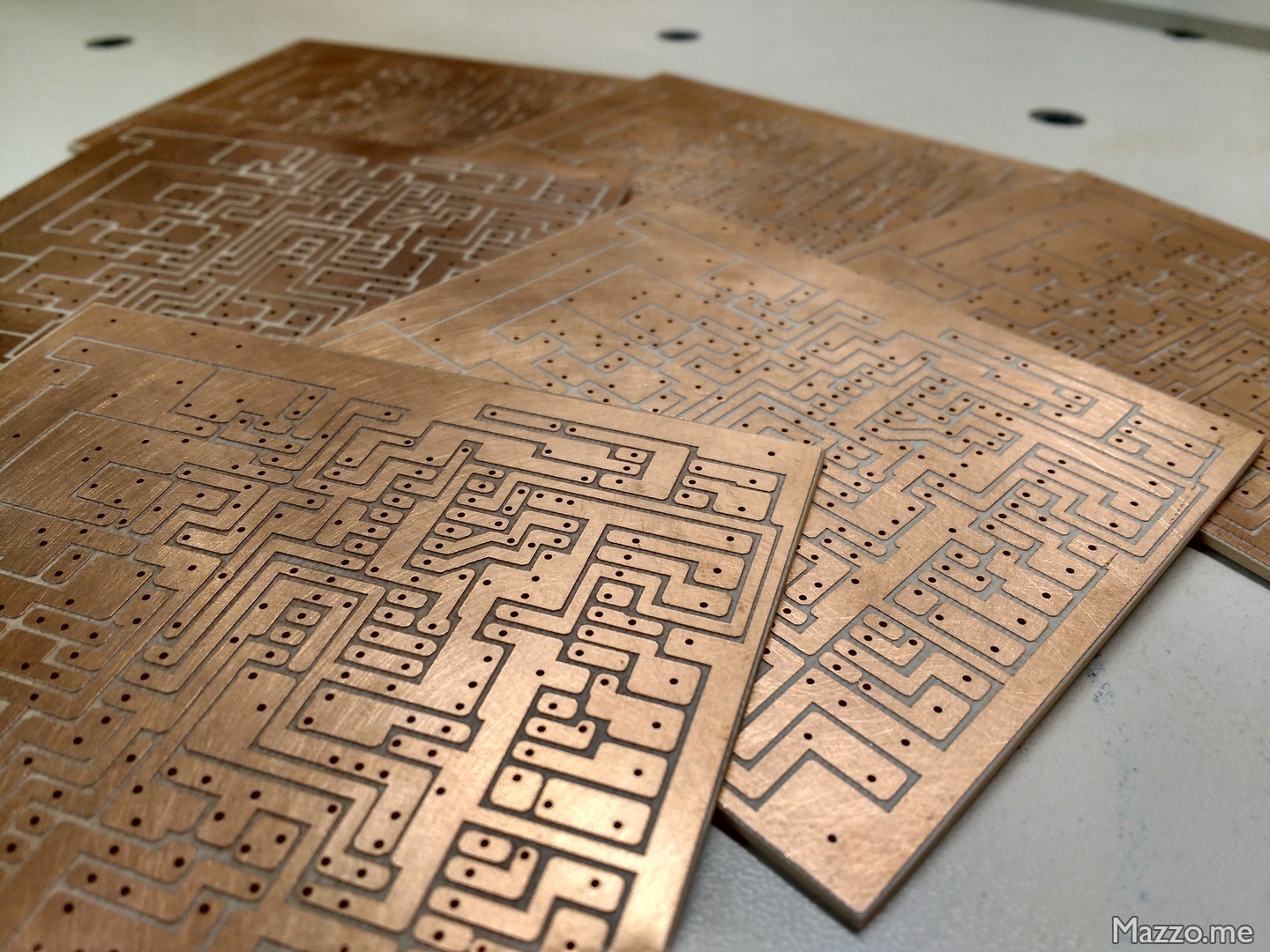
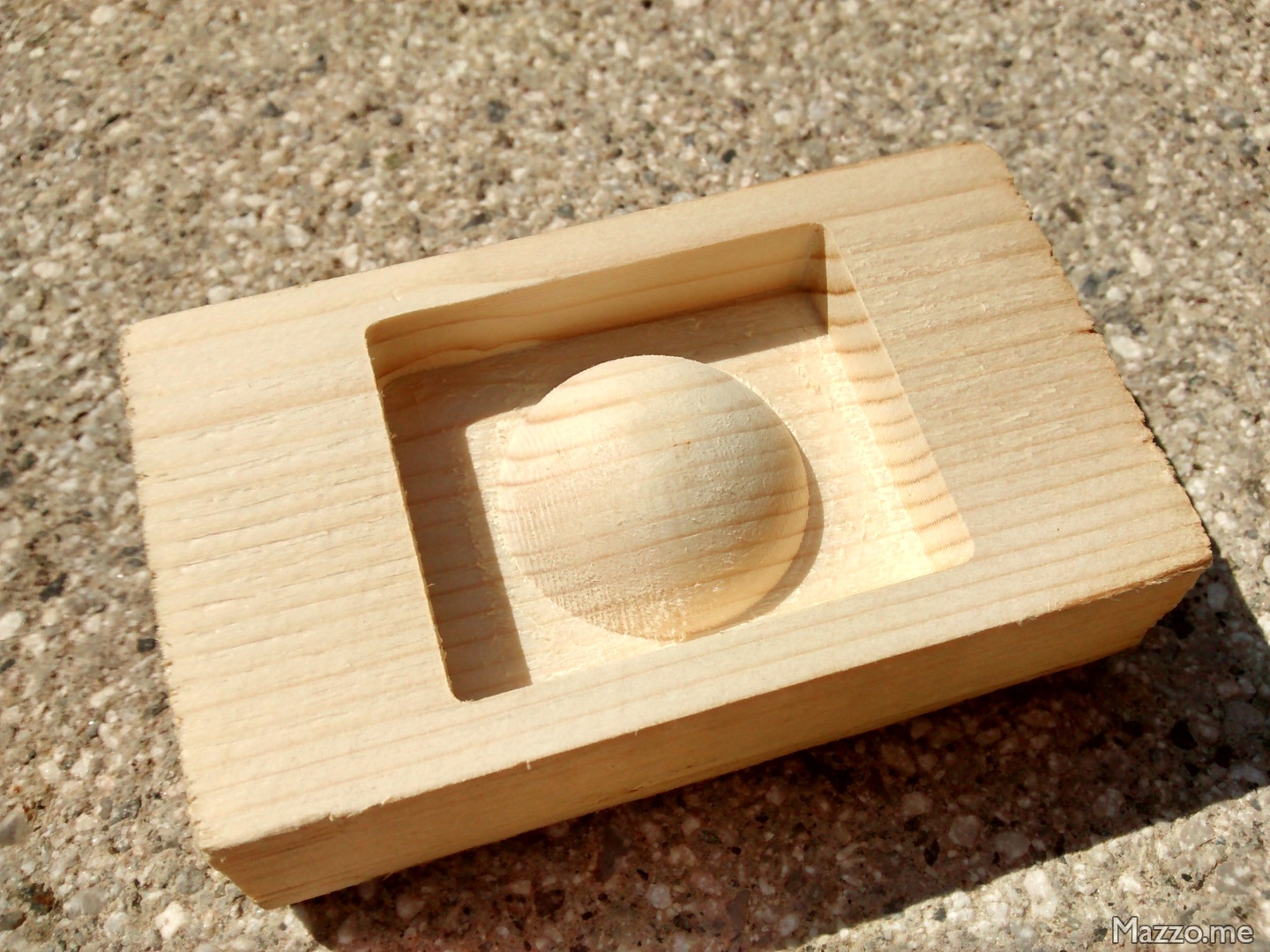
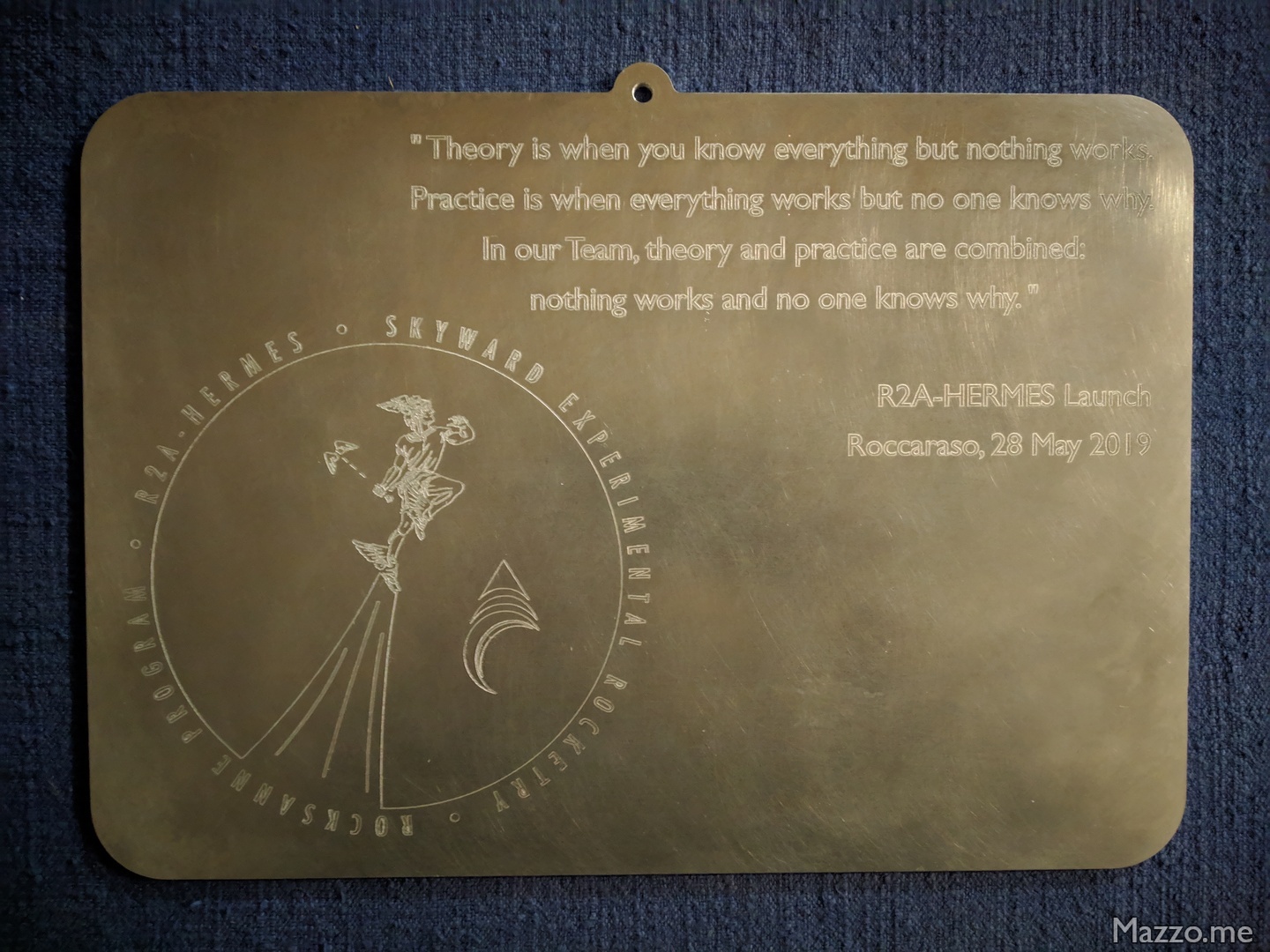
Alcuni dei lavori che ho realizzato con la mia MPCNC: