Sistema Espulsione Ogiva Missile
 Sistema espulsione ogiva missile - Mazzo.me
Sistema espulsione ogiva missile - Mazzo.me
Ho ideato e realizzato questo sistema per un missile di Skyward Experimental Rocketry. Serve per sganaciare l’ogiva del missile ed espellere i paracadute.
Il sistema funziona grazie a delle molle che spingono l’ogiva allontanandola dalla fusoliera ed a un motore che muove dei braccetti che tengono ancorata l’ogiva alla fusoliera prima dell’espulsione.
Ho disegnato l’intero sistema con il programma di disegno CAD SolidWorks:
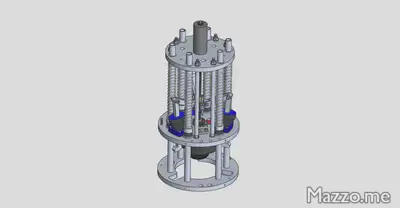
Con le due configurazioni prima e dopo l’espulsione:


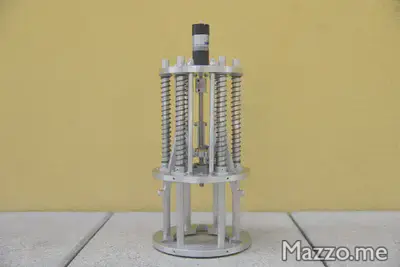
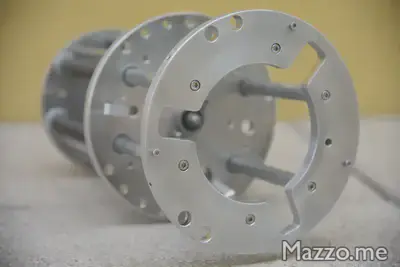
Durante la realizzazione sono state necessarie varie modifiche e aggiunte rispetto alla configurazione iniziale:
Il movimento dei braccetti è affidato ad un motore DC a 12 V accoppiato ad un motoriduttore:

La vite è fissata al motore con un giunto elastico:

La parte mobile centrale che viene mossa dalla vite è stata realizzata con la mia MPCNC:
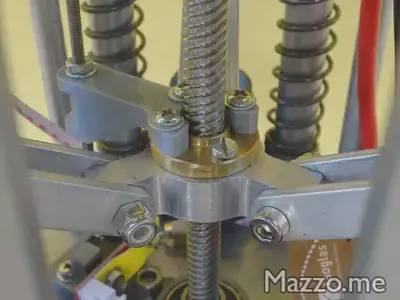
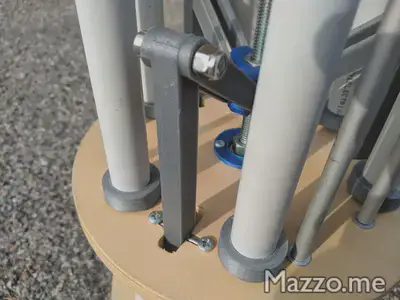
Così come le bielle che uniscono questa parte ai braccetti:

La vite gira su cuscinetti a sfere:

Dei connettori accessibili dall’esterno permettono di alimentare il motore in caso di necessità:


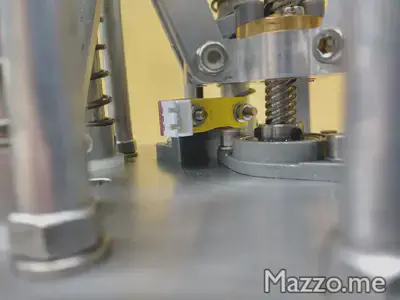
Per la chiusura del sistema è presente un finecorsa ottico:
Anche i braccetti mobili sono stati realizzati con la mia MPCNC:

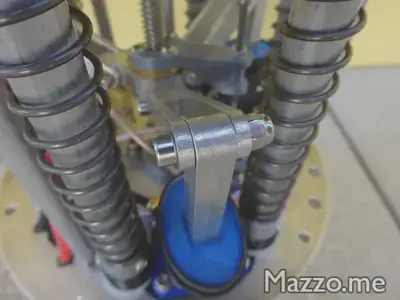
I braccetti sono fissati alla base con un perno che ne permette la rotazione:
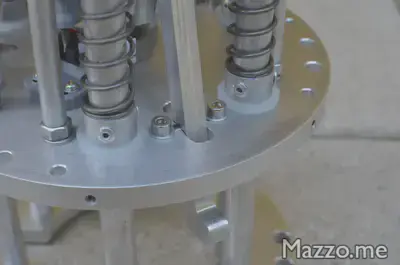
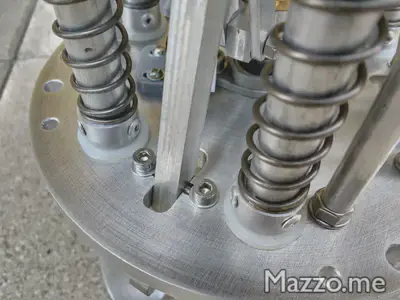
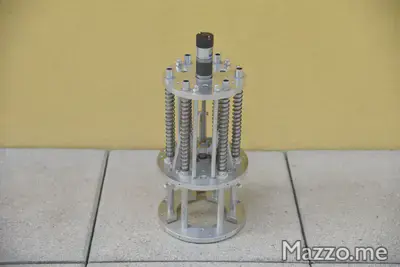
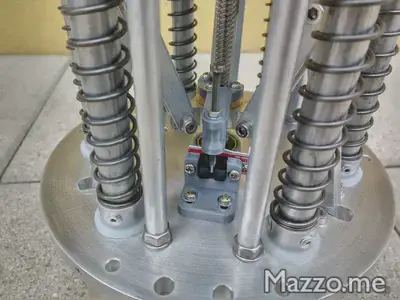
Una volta sganciata l’ogiva viene spinta da sei molle:


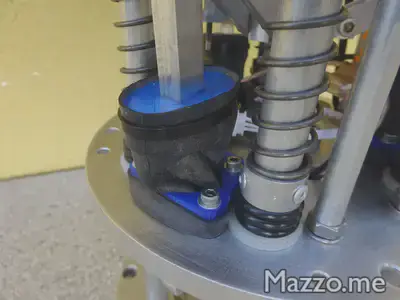
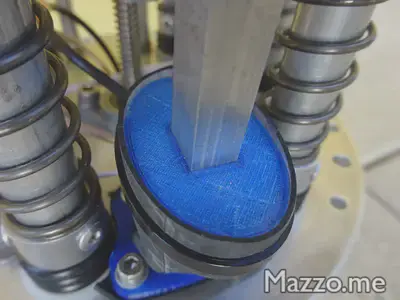
Un’aggiunta che ho fatto dopo la progettazione iniziale è stata rendere il sistema impermeabile all’acqua.
Per il movimento dei braccetti ho realizzato una copertura con una camera d’aria e dei supporti stampati con la mia Stampante 3D:
È presente un’antenna per GPS e telemetria:

Sulla base di appoggio alla fusoliera sono presenti tre viti disposte non simmetricamente per avere una sola posizione di montaggio possibile:
Prima di realizzare il sistema finale ho anche realizzato un modello in compensato e plastica: